智源研究院宣布开源具身大脑RoboBrain 2.0 32B版本以及跨本体大小脑协同框架 RoboOS 2.0单机版。
RoboBrain 2.0,作为集感知、推理与规划于一体面向真实物理环境的“通用具身大脑”,32B版本凭借时空认知能力的突破,在多项权威具身智能基准上全面刷新纪录,此前发布的7B版本,具备紧凑高效的模型结构,其轻量化设计完美适配边缘设备部署需求,能在低资源环境下稳定运行,同时相比主流的开闭源模型性能依旧强劲。
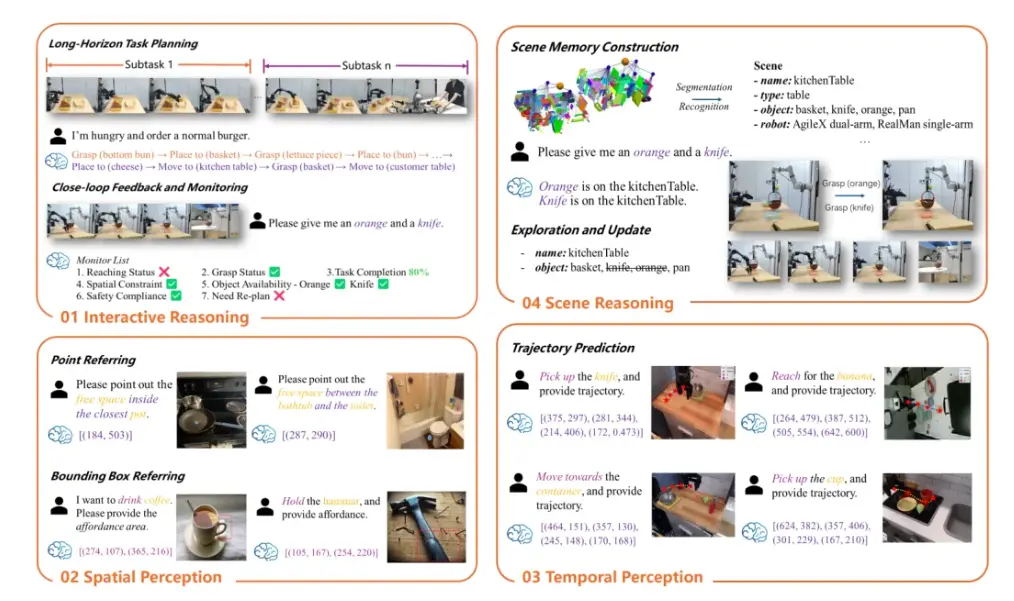
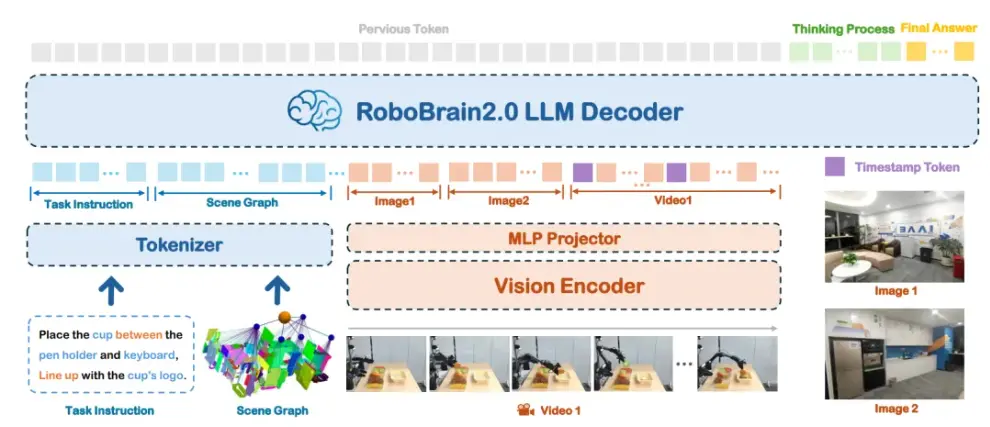
RoboBrain 2.0 采用模块化的编码器 - 解码器架构,为复杂的具身任务实现了感知、推理和规划的统一。与专注于通用静态视觉问答(VQA)的传统视觉 - 语言模型(VLMs)不同,RoboBrain 2.0 在保持强大通用 VQA 能力的同时,专门针对具身推理任务,如空间感知、时间建模和长链因果推理。该架构将高分辨率图像、多视图输入、视频帧、语言指令和场景图编码为统一的多模态标记序列,以进行全面处理。
RoboOS 2.0作为全球首个具身智能SaaS开源框架,创新性集成MCP协议与无服务器架构,实现轻量化部署,打通智能大脑与异构本体协同通路。同步推出单机版产品线及RoboSkill技能商店,通过深度集成实现机器人技能模块智能匹配与一键适配功能,标准化接口有效消除厂商与硬件适配流程差异。同步推出开箱即用镜像,支持"三行指令"极速部署,全面赋能开发者高效构建智能机器人系统。
RoboOS 2.0实现了大脑云端优化推理部署与小脑技能的免适配注册机制,显著降低开发门槛,典型场景下,相关代码量仅为传统手动注册方式的1/10。
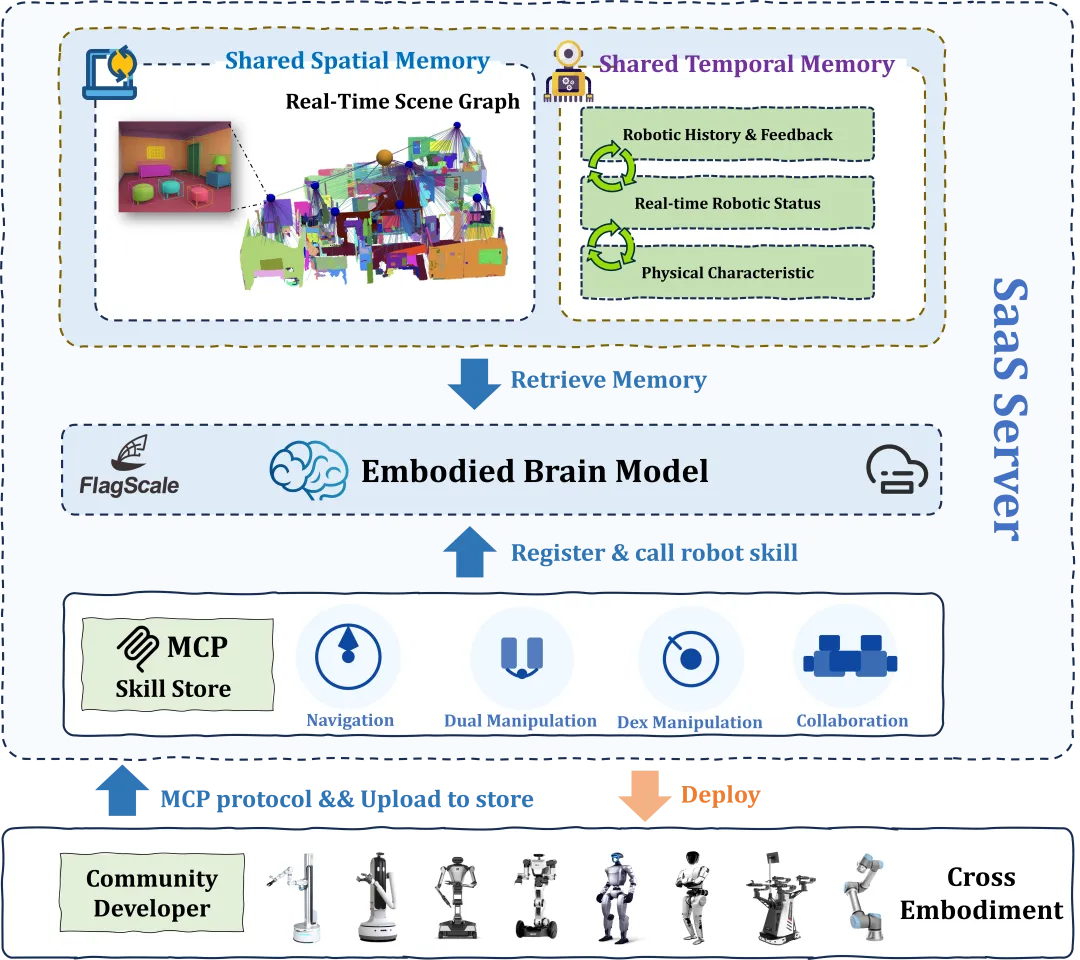
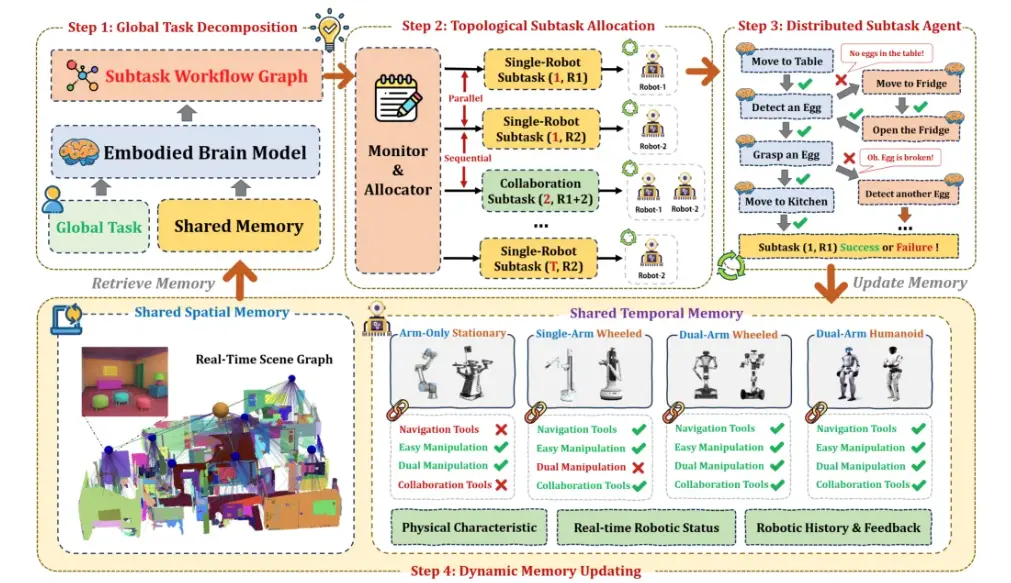
相较于1.0,RoboOS 2.0对端到端推理链路进行了系统级优化,整体性能提升达30%,全链路平均响应时延低至3ms以下,端云通信效率提升27倍。在功能层面,新增了多本体时空记忆场景图(Scene Graph)共享机制,支持动态环境下的实时感知与建模;同时引入多粒度任务监控模块,实现任务闭环反馈,有效提升机器人任务执行的稳定性与成功率。
目前,RoboBrain 2.0及RoboOS 2.0已全面开源,模型权重、训练代码与评测基准全部可用。